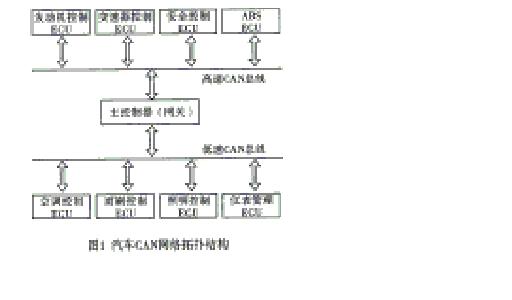
I. Introduction This article refers to the address: http:// With the continuous development of automotive computer control technology, more and more computer control systems are on the modern automobile, and the connection is getting closer. Such as engine control, shift control, brake anti-lock control, airbag control, lighting control, air conditioning control, instrument management, etc. In the original car, these computer control units often do not form a network through the bus, but independently control, or the relevant control unit communicates through the serial port. Many cars now use CAN (Controller Area Network) bus to connect them, but there are many modern computer control units in the car, and the control time of each control unit is different. Some systems have high requirements for real-time performance. If the actuator does not receive timely response after the system command is issued, it may cause serious consequences or even car crash, such as brake anti-lock control unit, airbag, etc.; and some systems For example, lighting control, air conditioning control, etc. have relatively low response time requirements for the system. Due to the increasing number of computer control units, the single-network CAN bus load is very heavy. The author constructs high- and low-speed CAN networks separately, and uses high-speed CAN network transmission for computer control units with high real-time requirements. Others use low-speed CAN network transmission. And the use of a microcontroller as a gateway. The transmission harness is greatly simplified, and the reliability is greatly improved. Second, the technical characteristics of the CAN bus The CAN (Controller Area Network) bus is a serial multi-master station LAN bus. It has high network security, communication reliability and real-time performance, simple and practical, and low network cost. It is especially suitable for automotive computer control systems and industrial environments with harsh ambient temperatures, strong electromagnetic radiation and high vibration. The communication medium can be twisted pair, coaxial cable or optical fiber, and the data transmission rate can reach 1 Mbits/s (the communication distance is up to 40m at this time). CAN bus is also widely used in automobiles, ships, robots, building automation and other occasions. Since the advent of the CAN bus, several high-level protocols have emerged to meet the multiple application needs of the CAN bus protocol. At present, most CAN bus-based networks use high-level protocols of the CAN bus. CANopen, DeviceNet and SDS are commonly used high-level protocols for any type of industrial control LAN application, while CAL is used for optimized control applications based on standard application layer communication protocols, and SAEJ1939 is used for truck and heavy vehicle computer control systems. . Third, based on P87C591 automotive computer control (a) P87C591 The P8xC591 is a single 8-bit high performance microcontroller with an on-chip CAN controller derived from the 80C51 microcontroller family. It uses the powerful 80C51 instruction set and successfully includes the PeliCAN function of the Philips Semiconductors SJA1000 CAN controller. The fully static core provides an extended power saver. The oscillator can be stopped and resumed without losing data. The improved 1:1 internal clock prescaler implements a 500ns instruction cycle at an external 12MHz clock rate. Microcontrollers are manufactured in an advanced CMOS process and are designed for automotive and general industrial applications. In addition to the standard features of the 80C51, the device provides many dedicated hardware features for these applications. The P8xC591 combines the features of the P87C554 (microcontroller) and SJA 1000 (independent CAN controller) with the following enhancements: enhanced CAN receive interrupt; extended acceptance filter; acceptance filter can be "change on the fly ". (two) system implementation At present, automotive computer control has involved power, economy, safety, reliability, cleanliness and comfort, including engine control, transmission control, patrol control, brake control, lighting control, air conditioning control, Wiper control, instrument management system, etc., and the electronic control units (ECUs) of various control systems are closely related to each other, and real-time data communication is required at any time. CAN bus is a controller LAN bus with great potential for application. The computer control system has been used more and more widely, and has become the main industry standard of the European automobile manufacturing industry, representing the mainstream development trend of the automotive electronic control network. All these sub-control systems in the computer control system of the car form a real-time control system network through CAN, 0. The line of the control unit must be guaranteed to respond within a certain period of time after the command of each control unit is sent out, otherwise a major accident may occur. This requires a higher baud rate setting and reliability for the CAN communication network on the car. Moreover, in the actual operation of the car, a large amount of real-time data exchange is required between many nodes. If all the nodes of the whole car are hung on a CAN network, so many nodes communicate through a CAN bus, and the information management configuration is slightly inappropriate, it is easy to appear that the bus load is too large, which will cause the system real-time response speed to drop. Not allowed in real-time systems. Therefore, after analyzing the real-time performance of each node in the car, we design two CAN communication networks with different speeds at high and low speeds according to the real-time requirements of each node. A node with strict real-time requirements and high reliability requirements is formed into a high-speed CAN communication network, and other nodes with relatively low real-time requirements are composed of a low-speed CAN communication network, and a gateway is set up to connect the two CAN communication networks with different rates. Achieve data sharing between all nodes. The communication network topology of the entire vehicle is shown in Figure 1. The control unit nodes such as engine control, transmission control, safety control, and anti-lock brake control (ABS) in Figure 1 are the core components of modern car motion, and have strict time response requirements. Therefore, the transmission rate is 500Kbps in this design. High-speed CAN communication network. Air conditioning control, wiper control, lighting control and instrument management control have relatively low requirements for real-time performance. The CAN communication network with transmission rate less than 125 Kbps is used. The main controller bridges the high and low speed buses and nodes. Data exchange, and the role of the gateway, to achieve network interconnection. The electronic control unit's microcontroller (P8xC591) is directly connected to the CAN bus controller (SJA 1000) via the data bus via the opto-isolator (6N137). Since the CAN bus controller has a receive buffer and a transmit buffer, the CAN bus controller has a receive buffer and a transmit buffer. The CAN bus controller's transmit port Tx0, the receive ports Rx0, Rx1 are directly connected to the CAN, bus transmit receiver TxD and RxD, Vref ports, CAN_L and CAN-H are the two differential receive transmit lines of the CAN bus. Each of them has a 120Ω bus-matching resistor between them. When a node occupies the CAN bus, the transmitting end of the node (level is 3.5 V) is connected to CAN_H, and the receiving end (level is 1.5V) is connected to CAN_L; when no When the node occupies the CAN bus, the levels on CAN_L and CAN_H are both 2.5V. docking station for macbook air,docking station for laptop,docking station usb c,USB C HUB,thunderbolt 3 usb type c hub Shenzhen Konchang Electronic Technology Co.,Ltd , https://www.konchangs.com